I backed this company on kick-starter
by 'buying' a pair of electric roller skates called Spnkix.
The design looked cool and fun, but I
am disappointed in the result. I thought I might as well take a
few minutes to publish this as a review here so that anybody else who
is considering buying them knows what they are getting.
In this post, I'm also posting some results of me
engaging in my other hobby: taking things apart. I actually enjoyed
this part, at least. Since this is the first time I have been the
first to take apart a new category of device, I'll be through in
posting photos for others who enjoy this stuff. My e-vehicle
engineering experience is relevant enough that I hope you find my
comments interesting too.
Teardown and Comments:
One skate shoe weighs 4.35 kg / 9.6 lb - it feels every bit of it.
Your shoes are secured in with two
large buckles, each is in the style of a snowboard binding.
Steel support between the wheels
underneath the foot.
The handheld remote control has a good
range. It worked 30 feet away, which implies it should be reliable
when used from just a few feet away as intended.
The wireless modules are prebuilt Nordic Semi RF modules. These
are a digital radio and so should be better than the old electric
skateboard remote controls that were prone to interference. It seems a bit wasteful to pick a two-way protocol for one way communications, though.

The nylon frame feel very solid and has
a nicely done honeycomb reenforcement pattern in the thicker areas.


It seems a bit odd that there is motor wiring into each wheel, but only a
motor on one side. The only plausible explanation is that there was
so little space in the main body, that the only place to put the
motor driver electronics was in the other wheel. This is an unusual
approach, as a 75W motor driver can be almost small enough to sit in
the space below the battery, but putting it in the other wheel
requires significantly more parts and wiring in a wheel which
otherwise could have been simple.

It has a substantial battery pack. At 125 Wh per
pack, this is bigger than any laptop batteries and probably not legal
to take onto an airplane.
Does not have enough connections to
have a full charge balancer. The 7S2P LiO cell configuration only has
4 charge balancer channels. This will somewhat shorten battery life
because the cells have different capacities and over time the
stronger cell in each pair will start to get more and more
overcharged and the weakest more and more undercharged. But 4 is
better than none.


The motor has three thicker phase
wires, and a red and a black wire in one connector and three wires in
another connector. This means it is a brushless motor with a hall
sensor, which is expected, since this is really the only way to get
this much torque and power into a hub without using a gearbox. Kudos
on not going cheap on the motor technology.
 |
| Hub motor - not disassembled |
I didn't disassemble the hub motor.
This is kind of tricky and dangerous to do and my curiosity was not
that strong. The strong magnets in hub motors will snap the pieces
around viscously. I am fairly confident it would have been like a
smaller version of the normal bike hub motors. (Search youtube for
“hub motor disassembly” if you're curious).
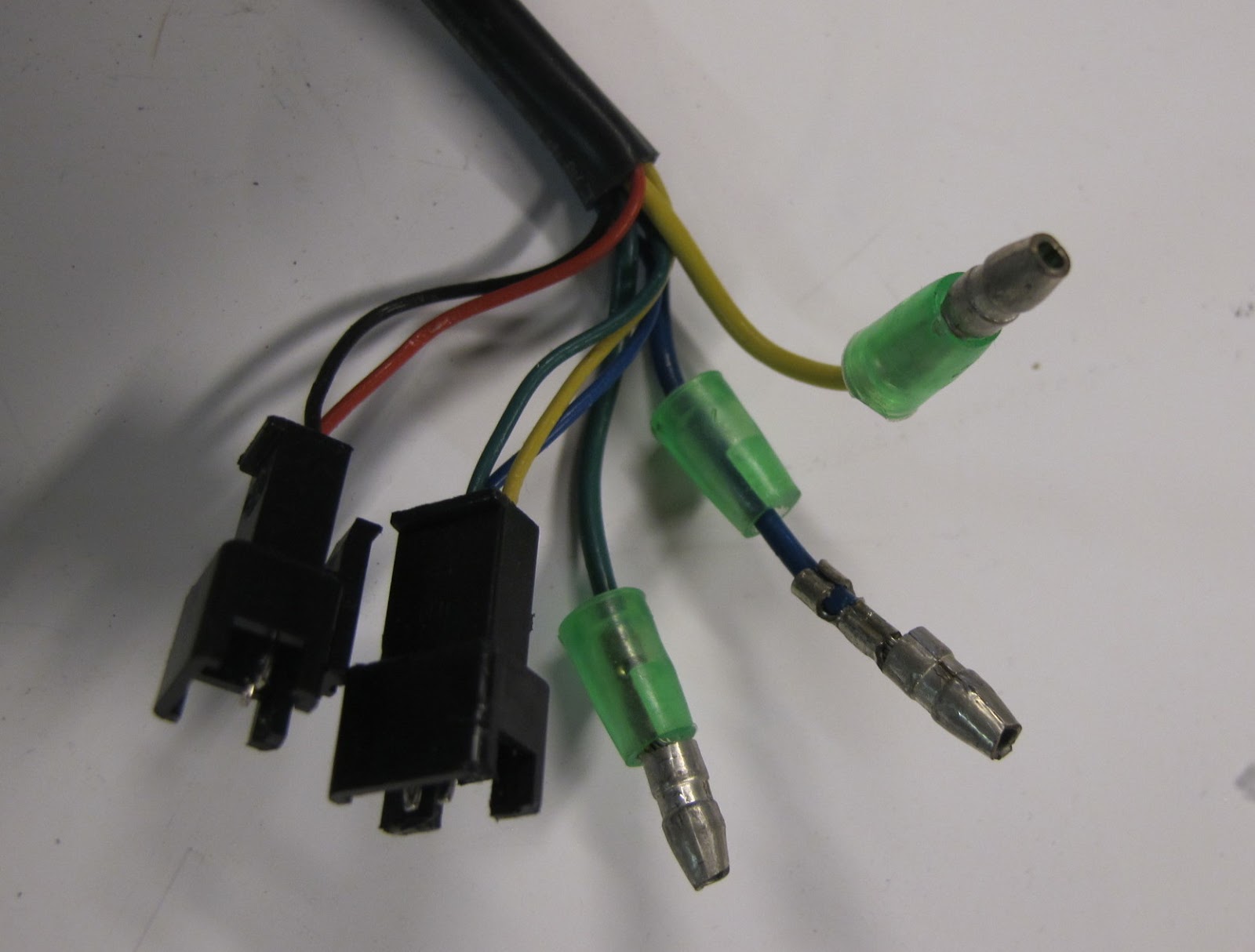 |
| Motor connectors |
I did notice that the manual suggests
you replace the tires by taking off the hubs of the wheels. Lies!This
is effectively impossible to do. Even after struggling to undo the
screw that hold on the hub plates (the Phillips socket strips very
easily), it is still impossible to simply pull off the side plate
like the manual says. I can't even prise it off when the motor is in
a vise. I assume this is either because it is too tight, or because
the magnets of the hub motor are holding it on. You often need a
special press to take hub motors apart. If the tires wear out or get
damaged, you're in for a lot of trouble.
There isn't any sealing or
waterproofing.
A quick high school physics calculation
on the specified maximum weight, slope and speed gives a required
power of 161W required per foot, which is considerably more than the
85W motor rating.
( 0.5*(81.6 kg+2*4.35 kg)*9.81*sin(5
deg)*4.17m/s )
So this is misleading, but on the other
hand, it would require a fantastic amount of skill to remain balanced
at top speed and top power, so this is not likely to be an issue in
reality.
Given the commendable lack of second
rate materials, and the un-commendable poor DFM (design for
manufacturing), I seriously doubt that a first production run was
profitable at $375 per pair, even ignoring the tooling costs. The
tooling costs would have been substantial, even considering how
slowly it was done.
Overall, this is a good effort for the
first version of a product. But given the flawed concept, I doubt there will be a second.
Hey there, where are you located? Can you email me at pediglide@gmail.com
ReplyDelete